凸版印刷(株)と(国)東京農工大学は、複数のロボットの行動を最適化するアルゴリズムに関する共同研究を開始する。
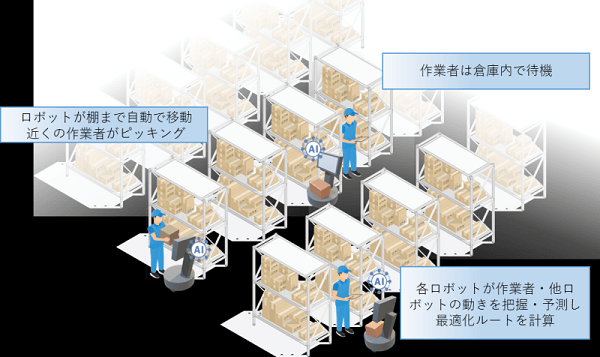
本共同研究では、人とロボットの協働に向け、「マルチエージェントシステム」を活用する。マルチエージェントシステムとは、複数の自律的なロボットをAIカメラ、各種センサーやスマートフォンなどのエッジデバイスと連携させ、全体最適化を図りながら、高度なタスクを実行させるシステムで、本共同研究を通じ、その技術を確立する。具体的に着手するのは、物流倉庫でのピッキング作業で人の動きを考慮し、自動搬送ロボット(AMR)の搬送経路を最適化するAI技術に関する研究開発。そのポイントは、①ロボットとエッジデバイス用AIの開発(AMRやスマートフォンなどの各システム上で動作するAIを開発。これにより、複数のAMRやエッジデバイス間で共有した様々な情報を利用し、各AMRが自律的に環境と状況を判断し、最適なルートをリアルタイムに動作することが可能になる)、②ピッキング倉庫における実証(物流倉庫におけるピッキング業務の省人化・省力化を目標に、①で開発したAIを活用したモデルラインを構築し、技術検証を実施する。また、作業者が業務開始前に①を用いて様々な条件でピッキング作業をシミュレートし、作業計画を策定する補助ツールとしての利便性についても検証する)―の2点だ。
本共同研究において凸版印刷は、最適化アルゴリズムのAMRへの実装と、ピッキングシステムの試作を行い、実際にピッキング倉庫における評価実証に取り組む。一方、東京農工大(藤田桂英研究室)は、マルチエージェントシステムを活用し、経路最適化アルゴリズム・シミュレーターの開発を行う。
凸版印刷は、倉庫で人と協働する複数台AMRの経路最適化システムを開発し、社内業務の効率化や、外販サービスとして展開するほか、マルチエージェントシステムを活用したサービスソリューションを、物流・小売・スマートシティ向けに展開する方針。また、AIとロボットの活用を推進し、産業と技術の発展に貢献していく。